Q. Transient behavior of a control system?
The transient portion of the time response of a stable control system is that part which goes to zero as time increases and becomes sufficiently large. The transient behavior of a control system is usually characterized by the use of a unit-step input. Typical performance criteria that are used to characterize the transient response to a unit-step input include overshoot, delay time, rise time, and settling time. Figure illustrates a typical unit-step response of a linear control system.
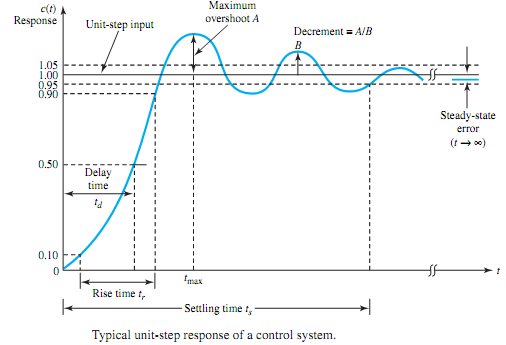
The following four quantities give a direct measure of the transient characteristics of the step response:
• Maximum (or peak) overshoot A is the largest deviation of the output over the step input during the transient state. It is used as a measure of the relative stability of the system. The percentage maximum overshoot is given by the ratio of maximum overshoot to final value, expressed in percent.
• Delay time td is defined as the time required for the step response to reach 90% of its final value.
• Rise time tr is defined as the time needed for the step response to rise from 10% to 90% of its final value.
• Settling time ts is the time required for the step response to decrease and stay within a specified percentage (usually 5%) of its final value.
While these quantities are relatively easy to measure once a step response is plotted, they cannot easily be determined analytically, except for simple cases.