Reference no: EM132389562
For Problems 1, 2, and 3, H, P and L are subspaces of R4 defined by

Question 1. Find three vectors u1, u2, u3 ∈ R4 satisfying the following properties:
{u1, u2, u3} is an orthonormal set, {u1} is a basis for L, {u1, u2} is a basis for P , and u1, u2, u3 is a basis for H. These bases will be useful for solving Problems 2 and 3.
Question 2. Let T : H → H be the linear transformation that rotates all points in H by 30° counterclockwise about the line L. Find a 4 × 4 matrix A such that
Note that you will have to use the more general definition of angle in R4 that is expressed in terms of the dot product and the arccosine function.
Question 3. Let T : P → P be the linear transformation that reflects all points in P about the line L. Find a 4 × 4 matrix A such that
Question 4. Let T : R5 → R6 be the linear transformation defined by
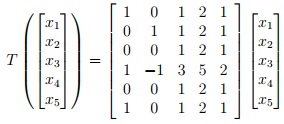
(a) Find a basis for the kernel of T.
(b) Find a basis for the image of T.
(c) Is T injective? If so, prove this. If not, give an example of two distinct input vectors giving rise to the same output vector.
(d) Is T surjective? If so, prove this. If not, give an example of a vector in R6 that is not the image of any vector in R5.
Question 5. Let
V = {p(x) : deg p(x) ≤ 4 and p(2) = 0 and p(3) = 0}.
Define T : V → V by
T (x) = (x - 2)(x - 3)p'''(x).
(a) Find a basis for V .
(b) Find a matrix representation for T with respect to the basis in (a).
(c) Prove that T is neither injective nor surjective.