Reference no: EM132274221
Problem - 24h take home portion
This problem must represent your own work. No collaboration or discussion with others is allowed. Other resources (class notes, homeworks, etc.) are allowed. Your submission must be received by 11:59p on Tuesday, April 2nd. You are to upload your files directly to the Gradescope website as two attachments: 1. A .tar.gz or .zip file containing a directory named after your uniqname that includes the code, 2. A PDF with the summary report of the results including figures and discussion.
A 2-D world is divided into a 100m x 100m grid (discretized in blocks of 1m2). There is a wall at the South end of the grid. The robot has a sensor that can measure the distance to the wall. The robot also has a sensor that can measure the distance to a beacon at (75, 75). Both these measurement models have a triangle probability density. The range of uncertainty is 10m for the wall sensor and 5m for the beacon sensor. The motion model also has a triangular uncertainty around the odometry obtained. This has a range of 15m.
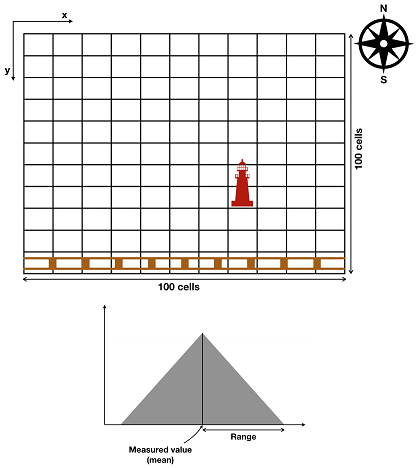
The initial position of the robot on the grid is unknown. The robot takes the following steps:
1. Move to the East for a distance of 30m.
2. Measure distance to the wall. Reading is 70m.
3. Move to the South for a distance of 10m.
4. Measure distance to the beacon. Reading is 30m.
Program the problem in MATLAB and plot the belief of robot distribution after each step. To plot the belief, you can plot a gray-scale image of 100m x 100m pixels.