Reference no: EM131302116
How to use PID controller to ensure a robot car run a specified degree with PID controller. And the inbuilt PID controller is disabled.
Objectives
1. Build a robotic car
2. Understand PID control design for robots
3. Design a PID controller. Tune a PID controller
Equipment
1. LEGOS NXT Robotic kit
2. PC to NXT USB cable
3. Computer with RobotC installed
Background
The car robot we are using is a differential drive car robot as it has two motorized wheels that provide drive and steering functions.There are some basic problems with this program. The car may not go straight as the two motors may not have the same speed even though we have commanded both of them to be at a specified power. This can be due to the different construction of the two motors as well as different outside environment for the two wheels. One motor my rotate faster than the other causing the car to drift. To counter these effects, we can use ROBOTC's inbuilt PID control function or we can build our own PID controller to ensure the car will run a specified degree.
Task
1. Build a LEGO NXT Robot car. Instructions are provided in the LEGO MINDSTORM's instruction manual. For testing, keep the robotic car upside down for design. Keep the robot fully charged, as design solution may change if the battery power changes.
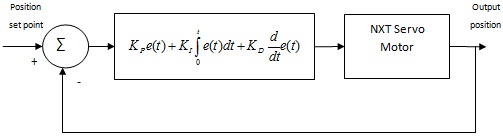
Figure: PID control for NXT position control
2. In ROBOTC, write a code for the PID controller. Define the error signal as the actual angle of the encoder and angle set point (target angle). The angle set point is 500 degrees. The motor should run for 10s.
a. It is important to disable all inbuilt ROBOTC PID control functions. This can be done using the commands shown below. Do not use any inbuilt ROBOTC PID control function.
nMotorPIDSpeedCtrl[motorA] = mtrNoReg;//disable NXT inbuilt PID
nMotorPIDSpeedCtrl[motorB] = mtrNoReg;//disable NXT inbuilt PID
nSyncedMotors = synchNone;//disable NXT inbuilt PID
b. Provide a soft copy (.c) of the code as well as put in the project report. The code should not be unnecessary complex and should be well commented explaining the functioning of the program.
3. Tune the PID controller by following the steps below
a. Use the Ziegler-Nichols (Z-N) method to find Ku and Tu. Draw a plot showing sustained oscillations and period of the oscillations. An example plot is shown in figure 3.5. Provide the values of Ku and Tu.
b. Using the values of Ku and Tu, show the initial tuned performance of the PID controller. Provide the rise time, percentage overshoot and settling time (± 5%)
c. Tune the PID values further for a maximum percent overshoot Mp< 6% , settling time < 1.2 sec (2% scenario) and steady state error of < 1.3 %.
4. Design a PID controller for speed control using the set point speed to 250 degrees per second. Tune the PID values for a percent overshoot < 7%, settling time < 1.5 s (5% scenario) and steady state error of < 10%.
|
Is a hadron always a baryon
: Explain how conservation of baryon number is responsible for conservation of total atomic mass (total number of nucleons) in nuclear decay and reactions.
|
|
What are the new values of the mean and median
: Suppose that you have 10 observations that have a mean of 7, a median of 6, and a standard deviation of 3. If you halve the value of each observation, what are the new values of the: Mean? Median? Standard deviation
|
|
Determine the needed leadership style
: Thoroughly analyze the situation and the needed areas of improvement. Determine the needed leadership style to help develop a solution. Outline an action plan for a resolution.
|
|
Why should we bother to perform experiments
: What lifetime do you expect for an antineutron isolated from normal matter?
|
|
Draw a plot showing sustained oscillations
: Use the Ziegler-Nichols (Z-N) method to find Ku and Tu. Draw a plot showing sustained oscillations and period of the oscillations. An example plot is shown in figure 3.5. Provide the values of Ku and Tu.
|
|
Compare the prompt radiation yields
: A radiation-enhanced nuclear weapon (or neutron bomb) can have a smaller total yield and still produce more prompt radiation than a conventional nuclear bomb.
|
|
What mass is converted into energy by a 1.00-mt bomb
: Fusion bombs use neutrons from their fission trigger to create tritium fuel in the reaction n + 6Li →3H +4He. What is the energy released by this reaction in MeV?
|
|
Determine some of the salient points about factors
: Determine some of the salient points about factors that drive strategy. What stood out for you?What did you consider critical to the success of a HR-business strategy? Using the organization you have selected for your Final Project as an example, de..
|
|
Find the mass converted into energy by a 12.0-kt bomb
: A large power reactor that has been in operation for some months is turned off, but residual activity in the core still produces 150 MW of power. If the average energy per decay of the fission products is 1.00 MeV, what is the core activity in cur..
|