Reference no: EM13965192
Control System Stability - Homework - MATLAB
Discussion Question
Given the denominator of a closed-loop transfer function, ??4+ 20????3+ ??1??2+ 4?? + ??2= 0 , discuss what values of K1 and K2 will lead to a stable system.
Solve the following problems:
1. For the given system below:
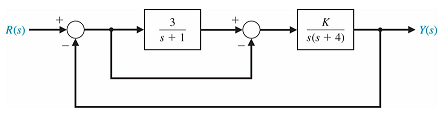
Determine the range of K for the system to become unstable.
2. Determine the stability of the following polynomials: (a) 2??4 + ??3 + 3??2 + 5?? + 10
(b) ??3 + 3408.3??2 + 1,204,000?? + 1.5 × 107??
(c) ??3 + 3????2 + (?? + 2)?? + 4
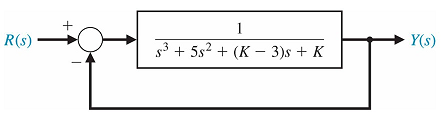
3. for the following system:
(a) Determine the range of K for stability.
(b) Develop an m-file to calculate the closed-loop poles for K from 0 to 5 with an increment of 0.1 (you may want to use the for loop in MATLAB). What are the poles when K = 4?
Design Project
The altitude control of a rocket is shown in the following figure:
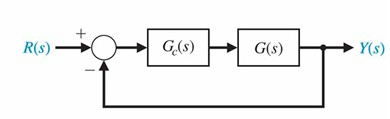
The controller given is ???? (??) = (??+??)(??+2)/?? (this is called a PID controller - we will cover PID controllers in Module 7) and the rocket transfer function ??(??) = ??/??2-1. Note that the rocket itself is open-loop unstable (a pole is on the right hand side of the complex plane) and feedback with a controller is needed to stabilize the system.
1. Using the Routh-Hurwitz criterion, determine the range of K and m so that the system is stable, and plot the region of stability (m vs. K).
2. Select K and m so that the steady-state error due to a ramp input is less or equal to 10% of the input magnitude.
With K and m you selected from Part 2, write a MATLAB program to obtain and plot the unit step response of the system, and determine the percent overshoot (P.O.) of the system from your plot.
|
Determine the image distance and the magnification
: An object is 30.0 cm to the left of a converging lens whose focal length is 50.0 cm. Draw a ray diagram to scale and from it determine the image distance and the magnification.
|
|
What ways are the positivistic theories
: 1). In what ways are the positivistic theories of deviance, crime, and delinquency inadequate or incomplete, according to the constructionist approaches? In what ways are the positivist approaches stronger than the constructionist approaches? Which ..
|
|
Calculate focal length of the lens and the height of image
: An object is 10 cm in front of a convergent lens that forms a real image 15 cm from the lens. The object is 2 cm high. Calculate the focal length of the lens and the height of the image. Construct a ray diagram to scale that verifies your results
|
|
What is the cartel price/ output and profit equilibrium
: Now assume that Soft Lens is able to enter into restrictive licensing agreements with potential competitors and create an effective cartel in the industry. If demand and cost conditions remain constant, what is the cartel price/ output and profit ..
|
|
Determine the range of k for stability
: Determine the range of K for stability. Develop an m-file to calculate the closed-loop poles for K from 0 to 5 with an increment of 0.1 (you may want to use the for loop in MATLAB). What are the poles when K = 4?
|
|
Want to use actual words from a source
: If you want to use actual words from a source, put them in quotation marks followed by an in-text citation showing that particular source.
|
|
Do not round off your computations
: Determine the equivalent units for April for mixing, materials, and conversion. Do not round off your computations.
|
|
Random sample from a population
: Let X1,..., Xn be a random sample from a population with the mean μ. What condition must be imposed on the constants c1, c2,..., cn so that c1X1 + c2X2 + ··· + cnXn is an unbiased estimator of μ?
|
|
Comparative balance sheets and an income statement
: comparative balance sheets and an income statement for Namekagon Corporation
|