Reference no: EM131102526
E91: Humanoid Robotics - Spring 2013 - Assignment 2
Task 1: Update software.
The starter code has been updated with minor bugfixes and a major revamp to inverse kinematics. I've also added code to compute the overall center of mass (COM) for a system in the KinModel class -- all you need to do is provide mass information when you create the bodies.
Task 2: Model a humanoid in profile.
Modify the kintest.py example code to develop a model of a human figure in profile (side view). It doesn't have to look as pretty as the example below, but you should do your best to get the link lengths and masses correct. Make sure that you can visualize at least the position of each rigid body's center of mass (light red outlined circles below), as well as the position of the overall center of mass of the system (red filled circle below).
I've also visualized the supporting line segment (horizontal blue line) and the projection of the overall COM onto the support (vertical blue line). You can tell this position is statically stable because the blue lines overlap.
Task 3: Generate random poses.
Pose your humanoid model in a few random poses to convince yourself you have gotten the kinematics correct. Here are two random poses from my model:
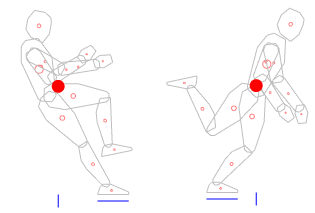
Clearly, these poses are not statically stable.
How were they generated? I start with a random set of joint angles for the entire body, and then transform everything so that the left foot is at the origin, like this:

This way, you don't need to worry about inverse kinematics, nor do you need to root the entire kinematic tree from the foot link.
Task 4: Generate stable poses
Once your random poses are looking reasonable, modify your program to collect at least 100 of them. Here are a couple samples from my program:
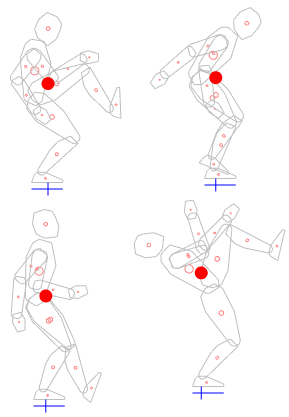
Produce a webpage demonstrating your program. Provide images of your humanoid model in a neutral pose, several (at least 2) random unstable poses, and several (at least 10) random stable poses. Comment on the performance of your system. How long does it take to generate stable poses? Can you think of ways to make it faster?
Attachment:- e91starter_week1.zip
|
Rhetorical analysis assignment
: Read this blog by Mike Wendling. Then use what you have learned about the Rhetorical Triangle, the four lines of argument, and the Lesson on Focus to write an analysis of its rhetoric in two pages or less. Use APA format. Alternatively, write a ..
|
|
Data signal is represented by an nrz signal
: The component generated at the symbol frequency can then be phase tracked by a PLL in order to generate the symbol synchronization, as illustrated by the following MATLAB simulation:
|
|
What are the financial statements most frequently provided
: One part of financial accounting involves the preparation of financial statements. What are the financial statements most frequently provided?
|
|
Declaring variables in programming
: Why is it discouraged to use underscores when declaring variables in programming?
|
|
Comment on the performance of your system
: E91: Humanoid Robotics - Spring 2013 - Assignment 2. Produce a webpage demonstrating your program. Provide images of your humanoid model in a neutral pose, several (at least 2) random unstable poses, several random stable poses. Comment on the per..
|
|
About the main female character in the film
: The papers ask you to answer/give your thoughts on four points in order to attain the full points for the course. Each of the four prompts is worth 25% of the overall paper, so it is important to answer all four. These four points are:
|
|
Discuss how information is carried from the sensory signals
: Discuss how information is carried from the sensory signals and transmitted to other areas of the brain for further processing. Support your discussion with at least 2 examples, terms, and concepts from professional experience and/or academic sour..
|
|
At what latitudes do we find the maximum salinity
: Examine the chart below. At what latitudes do we find the maximum salinity? Briefly explain what contributes to high salinities here versus polar and equatorial regions.
|
|
Determine the increase in velocity of the space shuttle at p
: Determine the increase in velocity of the space shuttle at point P so that it travels from a circular orbit to an elliptical orbit that passes through point A. Also, compute the speed of the shuttle at A.
|