Reference no: EM13670978
1. Build a simple 3 link/3 joint revolvate robot, with the equivalent of a ball joint for J 1 and J2. J1 rotates in the horizontal plane and J2 rotates in the vertical plane to form the robot waist and shoulder joints. J3 is the elbow joint. Define the robot as Robot. Use the appropriate functions (i.e. methods) in the Robotics Toolbox.
Hint: Make a1=0, a2=1 and a3=1. Then determine where a Twist should occur.
Define a pose of 3 joint angles in the variable
Q. Then use the toolbox function plot() to generate a display of your robot in this pose. Generate a second pose and re-plot it.
Enter >> help SerialLink/plot at the MATLAB prompt. Explore the options that are available. Explore the options by repeating the plotting to see their effect.
You can copy your plots by clicking on Edit and going down to copy figure. Do this to add images to your homework.
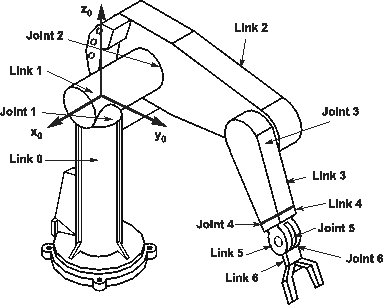
2. Build a 6 link/6 joint robot. Recall the limitations of the dh parameters. We must define all joint rotations about the joint's Z-axis. Recall our class discussion about using the TWIST angle that is described as α in the dh table. You can refer to Spong et al for the twists needed for a spherical wrist.
Create a new vector Q. Question... why do you need to use a new vector instead f just using the one you have for #1? Use the plot() function to explore this robot in different poses.
3. Run the Robotics Toolbox file mdl_puma560.m . This produces a robot named p560. Plot this robot. You will see that it has a spherical wrist. But, take a look at the structure of the robot. It is not as simple as the one we made in class. This is the famous PUMA robot. Enter a vector of joint angles that are all 0s. When you plot p560 you will see that it takes a strange pose. Also look at the enbow. You will see that the upper and lower links of the arm are offset. Then enter >> p560 at the MATLAB prompt. Look at its dh table. Consider its differences from your table from #2. Note the different values for the lengths of links 1 and 2. Also note that there are now non-zero values for the d variable identified with links 3 and 4. Go to Spong et al and read about the dh 'offset'. We will discuss this in class on Tuesday. Also, notice how the spherical wrist is formed with 3 twists. Compare this with your robot from #2. Also compare the plot of p560 and its dh values to the drawing below. Is the model accurate?