Rotation about the origin - 2-d and 3-d transformations
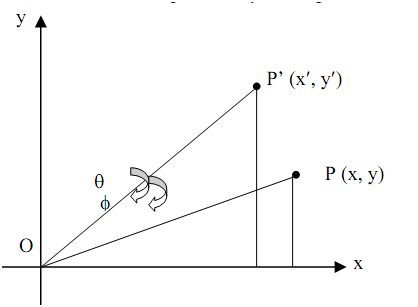
Specified a 2-D point P(x,y), which we need to rotate, along with respect to the origin O. The vector OP has a length 'r' and making a +ive or anticlockwise angle φ with respect to x-axis.
Suppose P' (x'y') be the outcome of rotation of point P by an angle θ regarding the origin that is demonstrated in Figure 3.
P(x,y) = P(r.cos φ,r.sin φ)
P'(x',y')=P[r.cos(φ+ θ),rsin(φ+ θ)]
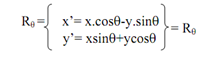
The coordinates of P' are as:
x'=r.cos(θ+ φ)=r(cos θ cos φ -sin θ sin φ)
=x.cos θ -y.sin θ (where x=rcosφ and y=rsinφ)
As like;
y'= rsin(θ+ φ)=r(sinθ cosφ + cosθ.sinφ)
=xsinθ+ycosθ
Hence,
Hence, we have acquired the new coordinate of point P after the rotation. Within matrix form, the transformation relation among P' and P is specified by:
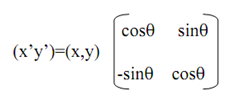
There is P'=P.Rq ---------(5)
Here P'and P represents object points in 2-Dimentional Euclidean system and Rq is transformation matrix for anti-clockwise Rotation.
In terms of Homogeneous Coordinates system, equation (5) becomes as
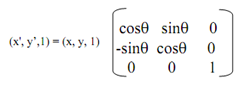
There is P'h=Ph.Rq, ---------(7)
Here P'h and Ph represent object points, after and before needed transformation, in Homogeneous Coordinates and Rq is termed as homogeneous transformation matrix for anticlockwise or =ive Rotation. Hence, P'h, the new coordinates of a transformed object, can be determined by multiplying previous object coordinate matrix, Ph, along with the transformation matrix for Rotation Rq.
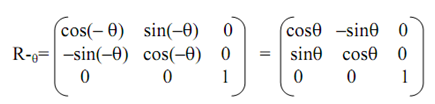
Keep in mind that for clockwise rotation we have to put q = -q, hence the rotation matrix Rq , in Homogeneous Coordinates system, becomes: