Reference no: EM132188078
Question (1): Let A ∈ R(n+m)×(n+m) be symmetric positive definite, with
A = 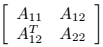
where A11 ∈ Rn×n, A12 ∈ Rn×m, A22 ∈ Rm×m, and let L be the cholesky factor of A, A = LLT. Partition L as
L = 
where L11 ∈ Rn×n, L21 ∈ Rn×m, L22 ∈ Rm×m.
(a) Show that L22LT22 = S where S = A22 - AT12A-112 is the Schur complement of A11 in A.
(b) Using the foregoing relations to drive a block version of the Cholesky factorization algorithm. Note that the algorithm should not require any explicit matrix inversion.
Question (2): Linear systems that arise in many applications can become quite large. It is often necessary to exploit any structure and /or sparsity in the matrices to reduce the computation burden. We will consider the one-dimensional Poisson equation: -y''(t) = f(t) on [0,1], with y(0) = y(1) = 0.
Such problems are frequently very hard to handle because it is often not possible to express y(t) in terms of elementary functions (as is done in undergraduate courses on ODE). Numerical methods are employed in order to approximate y(t) at discrete points inside the interval [a,b]. This approach will leads to a linear system of equations (we will learn how in the numerical PDE class).
The approach we consider begins by subdividing the interval [a,b] into n + 1 equal subintervals, each of length b-a/n+1: t0 = a, t1 = a + h, t2 = a + 2h, ......, tn = a + nh, tn+1 = b; The points ti = a + ih are called grid points, and the value h = b-a/n+1 is called the step size. Smaller step sizes generally produce better approximations to the derivatives, so better accuracy requires smaller step size, and hence larger number of grid points. Let yi = y(ti) and fi = f (ti), and show that by using the finite difference method, we can compute approximations to yi by solving the linear system Ty = h2f , where
T = 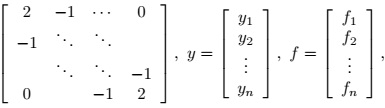
(a) Prove that the matrix T has an LU factorization with L(i, i) = 1 and L(i + 1, i) = -i/i+1 , U (i, i) = i+1/i and U (i, i + 1) = -1.
(b) Is partial pivoting needed?
(c) Write a Matlab function T = poissonmat(n) which created the n × n matrix T for given n.
(d) Write a Matlab function y = poissonsolve(f ) which, given a vector f of length n, computes the solution y of T y = h2f .
(e) Let f (t) = sinΠt, then the right hand side fi = sinΠ(ti). Experiment with various values of n, say n = 10, 100, 500, 1000. Fill the following table:
Question (3): We consider the approximations to the eigenvalues and eigenfunctions of the one-dimensional Laplace Operator L[u] = -d2u/dx2 on the unit interval [0,1] with boundary u(0) = u(1) = 0. A scalar λ is an eigenvalue of L if there exists a twice -differentiable function u s. t. -u''(x) = λu(x) on [0,1] with u(0) = u(1) = 0. In this case u is said to be an eigenfunction of L corresponding to the eigenvalue λ. This continuous problem can be approximated by the discrete eigenvalue problem
where we have set
T = 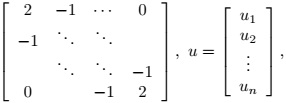
with ui = u(xi). It can be shown that the N × N matrix TN has eigen-values νj = 2(1 - cosΠj/N+1) for j = 1 : N, corresponding to the eigenvectors uj(k) = √2/(N+1) sin(jkΠ)/(N+1) is the kth entry in uj. Notice that the eigenvec-tors are normalized w.r.t. the 2-norm. Also notice that eigenvalues of Tn lie in the interval (0,4). Hence, the eigenvalues of h-2TN lie in the interval (0, 4(N + 1)2).
(a) Express the spectral condition number κ = λN /λ1 of TN (which is the same as the condition number of h-2TN ) as a simple function of N for N → ∞.
(b) Use Matlab to plot the eigenvalues of TN for N = 21 (from smallest to largest).
(c) Again using N = 21, use Matlab to plot the eigenvectors uj of TN for j = 1, 2, 3, 5, 11, 21. The plot should be of the form (k, uj(k)) where k = 1 : 21. Note that as j increases, the behavior of the eigenvectors (approximate eigenfunctions) becomes increasingly oscil- latory;these eigenfunctions are often called "high energy modes".
(d) Write a Matlab code implementing the power method to compute approximations of the largest eigenvalue λN of L and corresponding eigenfunctions. Use N = 500 and apply the algorithm to h-2TN . Start with a random initial guess, use normalization in the 2-norm, and stope when the difference of two subsequent approximate eigenvectors has 2-norm less than some prescribed tolerance τ . (e. g. τ = 10-6).
(i) Report the number of iterations performed
(ii) compared approximations with exact eigenvalue/eigenvector pair.
(iii) Use matalb to plot the computed eigenvector.
(e) Write a Matlab code implementing the inverse power method to compute approximations of the smallest eigenvalue λ1 = π2 of L and cor- responding eigenfunctions. Use N = 500 and apply the algorithm to h-2TN . Start with a random initial guess, use normalization in the 2-norm, and stope when the difference of two subsequent approximate eigenvectors has 2-norm less than some prescribed tolerance τ . (e. g. τ = 10-6).
(i) Report the number of iterations performed
(ii) compared approximations with exact eigenvalue/eigenvector pair.
(iii) Use matalb to plot the computed eigenvector.
Question (4): Use the poisson3d.m code to build linear systems Au = b. In the Matlab scripts you will have three linear systems which are the dis- cretizations of the Poisson's equation in 1, 2, and 3 dimension.
- We will consider the conjugate gradient methods with preconditioners.
- Increase the size of m in the code, which is the grid size for the dis- cretization. Run pcg again, and find the iteration numbers.
- set the stopping tolerance 10-12.
- You can use help or doc to find the syntax of pcg.
- Preconditioner P1: we can consider to use the incomplete Cholesky fac- torizations. (in Matlab ichol). L = ichol(K3D, struct(′type′,′ ict′,′ droptol′, 1e-02,′ michol′,′ of f ′)), we set P1 = LT∗L as our preconditioner.
- Another preconditioner P2: we can consider is the diagonal matrix of A. P2 = diag(diag(A))
- Or we can use the preconditioner P3, here P3 = triu(A);
- Compare the three preconditioners for each dimensional case, and re- port the best preconditioner you choose. Here are some key points you need to include in your report:
(a) For n = 1, this is the Poisson in 1D case. Report the iteration numbers for the following:
(b) Repeat your tests for the poisson in 2D and 3D. Report the iteration numbers;
(c) For each dimension, plot the computed solutions by direct method(backslash in Matlab) and computed solutions by iterative method (pcg).
Choose the best preconditioner you find.
(d) Organize your numerical data, report them by tables or figures.
(e) Don't forget to report what you have observed and your conclusions.