Reference no: EM131102098
E28: Mobile Robotics - Fall 2015 - HOMEWORK 3
1. Accelerometers and Gyroscopes
Visit the SparkFun robotics "Accelerometer, Gyro, and IMU Buying Guide" at https://www.sparkfun.com/pages/accel_gyro_guide. Then answer the questions below.
a. Explain the tradeoff between sensing range and precision (note that this tradeoff is endemic to all sensors, not just accelerometers and gyroscopes).
b. What's the difference between a gyroscope and an accelerometer? What are they good for? Which one can tell you which way is down, and why?
c. Sketch a plot of the output of a single-axis accelerometer (aligned vertically) as it takes a trip up the Hicks elevator, starting at zero velocity in the basement, and ending at zero velocity on the third floor, with a long constant-velocity segment in the middle. Your plot should have time on the x-axis and sensor output on the y axis.
d. It would be really useful to have a sensor that directy measures linear velocity without observing any outside references. Explain why this is more or less impossible. How could you try to "fake" such a sensor using an accelerometer?
2. Specifying a motor
To specify a motor for a robot, it's a good idea to estimate the peak power that will be required. Assume that the Turtlebot pictured below weighs 5 kg, and that we want it to be able to climb a 30o incline at a velocity of 0.75 m/s.
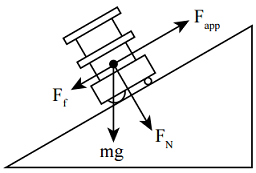
The force applied by the robot, Fapp, must be enough to lift the robot's weight up the slope against gravity, and to oppose the force of friction:
Fapp = Ff + Fw
In the computations below, make sure you use the appropriate units, and show your work.
a. Start with Fw, the force required to counter gravity. It should be equal to the projection of the gravity vector onto the direction of motion. Compute Fw in Newtons.
b. Next, consider Ff, the force of friction, which is the product of the coefficient of friction µ (conservatively assumed to be 0.3) and the projection of the force of gravity perpendicular to the surface, FN. Compute Ff in Newtons.
c. Now you should have Fapp, the magnitude of the applied force. Power is force times velocity. What is the mechanical power, in Watts, required to get the robot up the hill at the desired speed?
3. Motor constants
The relationship between back-EMF voltage e (V) and motor speed ω (rad/s) is:
e = keω
Similarly, the proportionality between torque T (Nm) and current I (A) is:
T = kt I
The constants ke and kt are known as a motor's back-EMF constant and its torque constant, respectively. In class, I said that these two constants are actually equal (due to analysis of resistive heat loss - see the reading for proof), but for now, let's just satisfy ourselves that they could be measuring the same thing.
a. Use dimensional analysis to establish the units of ke, then expand your answer out to express it solely in SI base units.
b. Now do the same two-step process for kt.
c. Explain why, despite appearances, these two quantities can actually be expressed in the same units.
4. Gears and stuff
Suppose a motor achieves its maximum efficiency ηmax at a speed of ω1 = 0.8 ωmax.
a. What is the torque T1 output by the motor at its peak efficiency? Express your answer in terms of the stall torque Ts.
b. Suppose we would prefer an output speed of ω2 = 0.1 ωmax, which we can do by choosing a gearbox with an appropriate gear ratio. What gear ratio (in terms of input:output radius) should we choose to achieve this output speed at peak efficiency of the motor?
c. What is the torque T2 achieved on the output gear at peak efficiency, given the gear ratio you specified above?
5. Reading a motor specification sheet
Check out the specification for the 16N78-212E motor from Portescap, online at https://www.portescap.com/sites/default/files/16n78_athlonix _specifications.pdf (this datasheet has multiple models - we want the 212E, which is the 12V model in the sixth column of the table). This motor is a fairly close substitute to the drive motors in the Turtlebot 2 robots in our lab. As you read the datasheet, note that the notation and units differ from what we used in class (for example, what we call kt they call kM).
a. Express ke for this motor in terms of the SI units you used to answer 3a (you will need to convert rpm to rad/s).
b. Compare this to the value they list for kt (they should be comparable but not equal). Why do you think the values might be slightly different?
c. Compute ωmax and Ts based on an input voltage of 12V, the listed resistance from the datasheet, and the supplied constants. How close do they come to the listed values?
d. Plot the torque-speed relationship for this motor. Use SI units, and label your plot's axes clearly.
e. Next, plot the torque-power relationship for this motor. Again, use SI units and label your plot's axes clearly.
f. What is the peak mechanical power Pm achievable with this motor?