Reference no: EM131478966
Project - Control and Trajectory Planning for a PUMA robot
Figure 1 shows a PUMA robot. This is a computer controlled six-joint robot, driven by six DC servomotors. In Figure 2, coordinate systems have been established using Denavit-Hartenberg (DH) representation for the first three degree-of-freedom of the robot. The geometrical parameters of the PUMA and other dynamical pa- rameters are given in table 1.
Figure 1. A PUMA robot. (a) A photo of the PUMA robot1. (b) a sketch of the PUMA robot with geometrical parameters2
In this project students are required to work in a group (no more than 3 students) to design a controller and a trajectory planner for the robot to move between initial and final locations.
The aim of the project is to design suitable controllers and trajectory planners, for the first three joints of the PUMA robot. The system developed should be implemented in SIMULINK and should allow the user to spec- ify the following:
1. Desired initial and final locations of the end-effector in Cartesian space (either in metres or in millimetres).
2. Robot speed as a percentage of the nominal maximum linear speed (It is assumed that the maximum linear speed of the robot is 0.3 m/s).
3. Plots are required: i.e., actual and desired joint positions and the wrist centre positions in Cartesian space vs. time, and tracking errors (in both joint and Cartesian space) vs. time.
The robot controller should be designed based on the parameters of the robot given in Table 1. Assume that the inertial properties provided for link 3 incorporates those for links 4-6. Designed controllers should pro- vide satisfactory performance for the robot with up to 1.0kg of payloads.
A SIMULINK model of the robot will be provided to test your controllers. The model accepts voltages to drive the power amplifiers for motors of joints 1 ~ 3. It also provides the positions and velocities of the mo- tors and the joints for feedback controllers.
You are required to work in groups of two to three students each. Group members should be familiar with all aspects of the project. The assessment will be based on the following aspects (detailed marking criteria are given at the Learning Guide of the unit):
- Individual performance of each student towards the project during tutorial sessions according to the sched- ules provided (40%).
- Individual demonstration of the MATLAB/SIMULINK programs.
Assessment Schedule and Requirements:
1. Calculate the controller gains for the independent joint controllers for joints 1-3 (using the parameters giv- en in Table 1). Using the calculated gains to design the feedback controllers for the PUMA and implement the controllers in SIMULINK.
2. Develop and incorporate a Cartesian space trajectory planner into the controller developed in Step 1. As- suming that the moving range for joints 1 - 3 is [-Π, Π]. The planner should accept user specified initial and final wrist centre positions, and speed (as percentages of the nominal maximum values - assumed to be 0.3 m/s) and plan a straight-line path for the robot to follow (generate the path every 0.1 second). The joint information will be calculated using inverse kinematics of the robot.
Hint: for the trajectory planning, you can assume that the maximum robot velocity is achievable instantaneously.
The group report should contain at least the following aspects:
- Aim of the project.
- Methodologies, detailed equations and calculations used in designing the controllers and trajectory planners.
- MATLAB/SIMULINK programs used in the project.
- Plots/outputs that demonstrate the effectiveness of the controller/planner.
- Conclusions
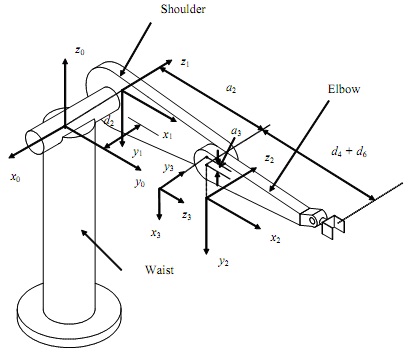
Figure 2. PUMA robot its coordinate system
Attachment:- Project-2017.rar