Reference no: EM131102152
E28: Mobile Robotics - Fall 2015 - HOMEWORK 5
1. Inverse kinematics
Consider the three-link planar arm depicted below:
The planar arm has one prismatic (sliding) joint which places the shoulder a distance d above the base, and two revolute (hinge) joints at the shoulder and elbow with corresponding joint angles θ1 and θ2, respectively. We will derive the inverse kinematics equations for placing the end effector (hand) at an arbitrary position and orientation.
a. Define the transformation from the hand coordinate frame to the base frame as
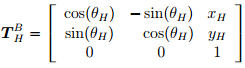
Explain why specifying a particular pose (xH, yH, θH) of the hand also specifies the position (xE, yE) of the elbow in the base frame, and solve for the elbow position in terms of the end effector pose.
b. Solve for the values of d and θ1 which yield a particular position (xE, yE) of the elbow.
c. Finally, solve for θ2 in terms of your answers for (a) and (b) above.
2. Differential kinematics
Continuing from in the example above, let (xS, yS), (xE, yE), and (xH, yH) all represent the base-frame coordinates of the shoulder, elbow, and hand, respectively. Finally, let θH represent the angle between the hand frame and base frame, as above.
a. Write out the 3 x 3 geometric Jacobian matrix given by
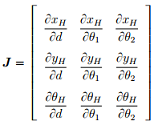
You should compose each of the elements of J using only the coordinates above, as well as the numbers 0 and 1.
b. Let l1 = l2 = 0.25 m. Show that J is not invertible when d = 1.0 m and θ1 = θ2 = 0 rad. To do so, you may compute the determinant of J or show that some of its rows or columns are linearly dependent. Geometrically, what does this linear dependence mean?
|
Another mode of operations including globalization
: The economic and financial crisis from 2008 to 2009, also known as the global financial crisis, was considered to be the worst financial crisis since the Great Depression. The general situation at financial markets has been additionally complicated b..
|
|
Daily flow of commerce transactions
: Common contracts take place in the daily flow of commerce transactions, and in cases with sophisticated or expensive promises may involve extensive negotiation and various conditions precedent requirements?
|
|
Higher risk of default and higher government revenues
: If debt accumulates too fast and investors start to worry about [higher risk of default/ higher government revenues/ reduced risk of default], we can suppose that the [price of the government’s bonds/ the effective real interest rate paid to bondhold..
|
|
Particular mode of acceptance
: It is important to note that where an offer specifies a particular mode of acceptance, only an acceptance communicated via that method will be valid?
|
|
Define the transformation from the hand coordinate frame
: E28: Mobile Robotics - Fall 2015 - HOMEWORK 5. Define the transformation from the hand coordinate frame to the base frame as, Explain why specifying a particular pose (xH, yH, θH) of the hand also specifies the position (xE, yE) of the elbow in the b..
|
|
Identify an intrapreneurial opportunity within a company
: Identify and assess an intrapreneurial opportunity within a company and assess its impact with respect to both the level of effort and resources needed and the potential benefits to the organization.
|
|
Paraphrase and synthesis of material
: In this first journal activity, you may write about any topic(s) of your choice, but it is best to use the textbook to study.
|
|
Determine an optimal stationary policy
: Use the policy iteration method to determine an optimal stationary policy.
|
|
Heads of agreement document
: In commercial agreements it is presumed that parties intend to be legally bound unless the parties expressly state the opposite as in a heads of agreement document?
|