In the case of permanent magnet DC motor whose stator consists of a permanent magnet we can take the field current to be constant (i.e. a constant magnetic field) and it can be shown that the torque is proportional to the armature current:

The back-emf voltage is proportional to the shaft speed:
Summing the loop voltages gives:

Summing the angular forces present at the motor's output shaft yields:
The above equations can be used to create the block diagram representation of the motor. 'Blind' version of this diagram is shown below.
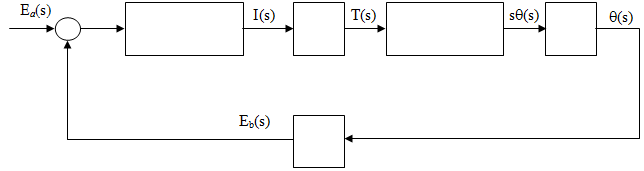
a) By taking the Laplace transform of the above equations fill in the empty blocks of diagram.
b) State the units for all constants used in the above equations.
c) What is the forward path transfer function of DC block diagram?
d) What is the feedback path transfer function of DC motor block diagram?
e) Determine the closed loop speed transfer function and state the order of the system.
f) Use Matlab/Simulink to develop a computer simulation of derived block diagram using the following data:
Ra = 0.6Ω; La = 0.012 H; I = 1.8kgm2;
β = 0.6 ................; km = 0.12 ................; kb = 0.12 ................
i.e. determine the motor speed step response to a step change in applied voltage from 0V to 240 V.