Reference no: EM132471953 , Length: 5 pages
ELE3105 - Computer Controlled Systems - University of Southern Queensland
Ships at sea undergo motion about their roll axis. Fins called stabilizers are used to reduce this roll motion. The stabilizers can be positioned by a closed-loop roll stabilizing system shown below
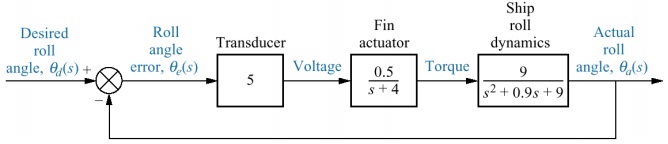
where the transducer works like a proportional (P) controller. If given the open-loop transfer function
G(s)H(s) = (22.5/((s+4)(s2+0.9s+9))x1
Question 1. Analytically find the open-loop response c(t) to a unit impulse input, show your mathematical working and plot this open-loop system response.
Question 2. Based on sampling theorem, determine a suitable sample interval T for the following parts of the assignment and show your reasoning. (Hint: Use Bode plots of G(s)H(s) to determine the system's cut-off frequency. At cut-off frequency the magnitude plot is about 3dB below the magnitude of the low frequency. The cut-off frequency can be considered as the highest frequency component).
Question 3. If the G(s) can be simplified into G1(s) 22.5/4(s2+0.9s+9), derive the discrete-time system transfer function GHP(Z) from G1(s) and show your mathematical working.
Question 4. Design a digital Proportional (P) controller to form a unit feedback control system, and optimise its parameter P with respect to the performance criterion IAE using the steepest descent minimisation process. Simulate the P controller system and plot its response for a unit step input (The performance criterion IAE = ∑k=0M| ek|).
(Please provide the plots that show the initial and the final/optimal responses).
Question 5. If the P controller is replaced with a PID controller, using the steepest descent minimisation process again to optimise the PID controller with respect to the performance criterion IAE = ∑k=0M| ek | for a unit step input. (Please also provide the plots that show both the initial and the final/optimal responses).