Reference no: EM132370980
Question - Use Matlab (Simulink) software for this Question
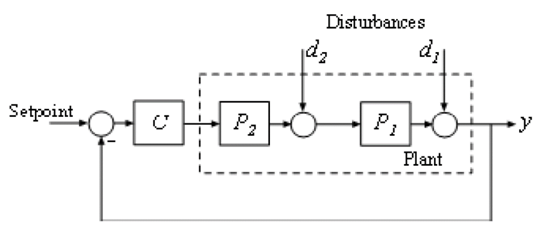
a) Design a single loop control system with a PI controller and a cascade control system with two PI controllers.
In this example, the inner loop plant P2 is: P2(s) = 3/(s+2)
The outer loop plant P1 is: P1(s) = 10/((s+1)3)
Use code from Matlab:
P2 = zpk([], -2, 3);
P1 = zpk([],[-1 -1 -1], 10);
Use pidtune command to design a PI controller in standard form for the whole plant model P = P1 * P2.
The desired open loop bandwidth is 0.2 rad/s, which roughly corresponds to the response time of 10 seconds.
b) Designing a cascade control system with two pi controllers
The best practice is to design the inner loop controller C2 first and then design the outer loop controller C1 with the inner loop closed. In this example, the inner loop bandwidth is selected as 2 rad/s, which is ten times higher than the desired outer loop bandwidth. In order to have an effective cascade control system, it is essential that the inner loop responds much faster than the outer loop. Tune inner-loop controller C2 with open-loop bandwidth at 2 rad/s.
C2 = pidtune(P2, pidstd(1, 1), 2);