Translation - 2-d and 3-d Transformations
It is the process of changing the position of an object. Suppose an object point P(x,y)=xI+yJ be moved to P'(x',y') by the specified translation vector V= txI + tyJ; here tx and ty is the translation factor in x and y directions, hence
P'=P+V. ----------------(1)
In element form, we have:
Tv= x'=x+ tx and
y'=y+ty ----------------(2)
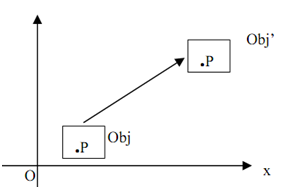
As demonstrated in Figure 2, P' is the new location of P, after moving tx along x-axis and ty along y-axis. This is impossible to enlarge a relation of the form.
P'=P.Tv ---------------(3)
Here Tv is the transformation for translation in matrix form.
We cannot present the translation transformation in (2x2) matrix form as 2-Dimentional Euclidean system.
Any transformation operation can be shown as a (2x2) matrix form, but except translation, which is translation transformation cannot be expressed like a (2x2) matrix form 2-Dimentional Euclidean system. Although via using Homogeneous coordinate system i.e. HCS, we can show translation transformation in matrix form. The Homogeneous coordinate system and advantages of by using Homogeneous coordinate system is discussed, in brief detail, in section of homogeneous coordinate systems.