Reference no: EM131225829
Robot Dynamics and Control
Fall 2015Note: Do not discuss with others, Write out your work to show the process how you arrived at the answer.
Problem 1.
The following tables show specifications of the motor and amplifier that we have chosen for our robot design. Our chosen amplifier controls an armature current (ia) to provide a controlled torque τm = Kmiiaa, where Km is a torque constant. We also have a gear box which has 1:50 gear ratio. Given these system setup, please answer the following questions.
Motor
|
Resistance
|
0.716 ?
|
|
Inductance
|
0.26 mH
|
|
Torque constant
|
42.9 mNm/A
|
|
Speed constant
|
223 rpm/V
|
|
Rotor Inertia
|
9870 g cm2
|
|
Friction coefficient
|
2.0e-7 Nm/rpm
|
Amplifier
a) Obtain two differential equations (electrical and mechanical) for the motor.
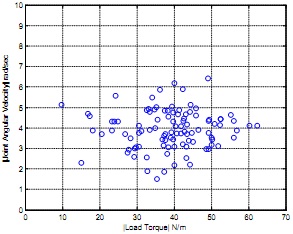
b) The following graph shows typical operating point of our robot in terms of magnitude of joint angular velocity and magnitude of load torque. Will the selected motor be able to cover all the operating point of our robot? To obtain ball park estimation, you can assume
di/dt = 0, d2θm/dt2 = 0
c) Design a joint angle tracking PD controller on the selected motor and gear box system shown in the diagram below so that the controlled system satisfies the given design criteria. Show that your designed PD controller actually satisfies all of the design criteria by showing step response of the closed-loop system.
Design criteria: %Overshoot<10%, Settling Time<1 sec
d) When the load torque is -10Nm, obtain the steady state error in joint angle and corresponding motor current for unit step input.
e) Design a PID controller to remove the steady state error. Find the bound of integral gain which provides stable closed-loop system when we are using the same PD gain designed in c). Simulate the result with the load torque of -10Nm.
f) As seen in the amplifier specification table, our chosen amplifier cannot generate the current more than 10A. Simulate the PID controlled system with the current saturated at ±10A. Compare the result to the result of PD controlled system. If necessary, add anti-windup control. Take a screenshot of your Simulink model and paste it here.
g) Consider the following time-varying desired joint trajectory θjd = 0.1sin(2πt) rad. Design a controller which tracks desired joint trajectory within |error|<1e-5 rad, augmented with the same PD controller you designed in c).
Problem 2.
Consider the Bipedal robot illustrated on the right. The robot has three links and three actuators on the ankle, knee, and hip joints (u1 = [u1, u2, u3]T). The value of the robot's inertial parameters and geometric parameters are, m1 = 3kg, l1 = 0.01 kgm2, m2 =3kg, I2 = 0.01 kgm2, m3 = 28kg, I3 = 0.1 kgm2, l1 = 0.5, l2 = 0.5, l3 = 0.5
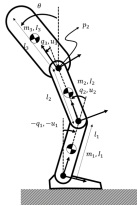
All the inertias are calculated with respect to the joint position (not Center of Mass) which connects to the parent link. Center of mass position for each link is
P1CoM,x = 0,P1CoM,y = 0.5l1, P2CoM,x = 0, P2CoM,y = 0.5l2, P3CoM,x =0, P3CoM,y = 0.5l3
The robot's generalized coordinates in vector form is q = [q1, q2, q3]T and corresponding velocity coordinates is dq = [dq1, dq2, dq3]T. Use MATLAB package posted in Compass2g to solve the following problems.
a) Obtain forward kinematics of position p2 = [p2x , p2y ] and orientation θ3 of link 3 at the hip joint.
Obtain the values when q1 = -30°, q2 = 50°, q3 = 10°
b) Obtain Jacobian of position p2 and orientation θ3 of link 3 at the hip joint. Obtain the values when
q1 = -30°, q2 = 50°, q3 = 10°
c) Obtain equation of motion of the robot, and print Inertia Matrix, Coriolis and Centrifugal matrix, and Gravity vector value when q1 = -30°, q2 = 50°, q3 = 10°, q·1 = 1 rad/sec, q·2 = 2 rad/sec, q·3 = 3 rad/sec
d) Obtain and plot joint angles, velocities, accelerations and joint torques at t = [0, 0.005, 0.01, ... ,0.195, 0.2]sec for the following two cases
a. Case 1
i. Horizontal position of the hip joint progress from -0.2 m to 0.2 m with constant velocity of 2 m/sec,
ii. Vertical position of the hip joint p2 stays at 0.85 m,
iii. While torso is upright vertically (θ = 0) and knee bent inward (q2 > 0).
b. Case 2
i. Horizontal position of hip joint progress from -0.2 m to 0.2 m with constant velocity of 3 m/sec,
ii. Vertical position of the hip joint stays at 0.9 m,
iii. While torso is upright vertically (θ = 0) and knee bent inward (q2 > 0).
e) Calculate the following cost function for the case 1 and case 2. Use MATLAB function "trapz" to do numerical integration. This cost roughly indicates energy efficiency of the walking. Please discuss how we can improve energy efficiency of the walking further without changing hardware design. Discuss what kind of constraints you have to take into account to obtain a "good walking motion" with optimized energy efficiency.
Cost Function: J = t = 0∫t = 0.2 ||u||d dt