Reference no: EM132234530
Question 1: A magnetic disk drive requires a motor to position a read/write have over tracks of data on a spinning disk and is modeled using the block diagram shown below-
a) Obtain Me Closed loop transfer function of the system
b) Determine the sensitivity Function of the system?
c) Determine the steady-state error of the system if the system is subjected to a unit-step input.
d) Using the value 10 + last 2 digits of your Valencia ID as the controller Gain Ka, Design Kb such the system is critically damped. Using Octave or matiab, Plot the unit step response of the system for the Case of critical damping for lOseconds. Hold the Plot
e) Repeat part d for an overdamped system, that is, Using Ka = 10 + Last 2 Digits of Valencia ID, Design Kb such that the damping factor Zeta of the system is 1.2 plot the system's unit step response. Hold the plot
f) Repeat part d for an underdamped system, that is, Design Kb such that the damping factor zeta of the system Is 0.8, Plot the system's unit step response- Print an three Plots on one graph.
g) For each of these three cases, use the step-info Command to take note of the rise time (time taken for the output to rise from 10% to 90% of steady-state), Settling time (time taken for the output to be within 98% of steady-state) and the % overshoot where applicable Fill the table
1h) Now change of Ka = 110 + last two digits of your ID and repeat the process in 1e, 1f and 1g; Plot all three Step responses on one graph, fill in the table and Describe the effect of increasing the loop gain Ka on Your results.
Question 2: API controller is used to control the course bearing of a drone submersible. The Submersible is often subjected to disturbances inputs from ocean currents as well as sudden impact from curious deep-sea creatures. The system is shown in Figure 1 below:
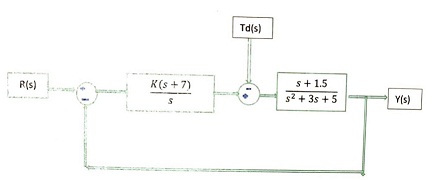
a) Obtain the Closed loop transfer function of the system.
b) Design the controller Gain K such that the steady-state error to a unit step-Input is Zero.
c) Using your choice of K, plot the response of the system to a unit-step input function.
d) What is the settling time (time taken for the output to rise to 98% of the reference signal)
e) What is the percentage overshoot of the system?
f) Using your choice of K, derive and plot the response of the system to a unit-step disturbance
g) If the system is subjected to a unit-step input at time t = 0 and a delayed unit-step disturbance input at time t=2 seconds. Derive and plot the system response. What is the steady-state value of the system.