Universal Motor:
The induced torque of a DC motor is given by
T = k φ I a
If we reverse the polarity of the voltage applied to a shunt or series motor, the resultant induced torque continues in the similar direction because both of the direction of the field flux and the direction of the armature current are reversed. Thus, this is possible to attain a pulsating but unidirectional torque from a DC motor connected to an AC power supply. Practically this is possible for the DC series motor, since the armature current (Ia) and the field current (If) should reverse at exactly the same time. In order for a series DC motor to function effectively on AC, its field poles and stator frame should be completely laminated; otherwise their core losses would be enormous. While the poles and stator are laminated, this motor is frequently called a universal motor, since it may run from either AC or DC supply. An equivalent circuit of a universal motor is shown in Figure
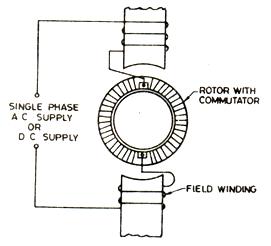
Figure: Equivalent Circuit of a Universal Motor
The field windings and armature have quite a large reactance at 50 Hz. Thus, Ea becomes smaller for AC supply as compared to DC supply. The motor is slower for a given armature current and induced torque on AC than it would be on DC.
Applications:
This is not suitable for constant speed applications. This is compact and gives more torque per ampere than any other single-phase motor. It is utilized where light weight and high torque are significant. Some of the applications of this motor are vacuum cleaners, drills, portable tools and kitchen appliances.