DC Servomotor:
The DC motors are experience due to brushes and commentators. These motors have comparatively lower torque to volume, and torque-to-inertia ratios. Though, the characteristics of DC motors are quite linear and these motors are easier to control.
The sketch of the basic components of DC servomotor is shown in Figure. DC servomotor is necessary an ordinary DC motor with a few difference in the construction. In servo application, DC motor is needed to produce rapid acceleration from standstill. The requirement of DC servomotor is low inertia and high starting torque. Low inertia can be obtained by decreasing the armature diameter and enhancing the length of the armature core.
Two different modes in which DC motor can be operated are :
1. Field control mode.
2. Armature control mode.
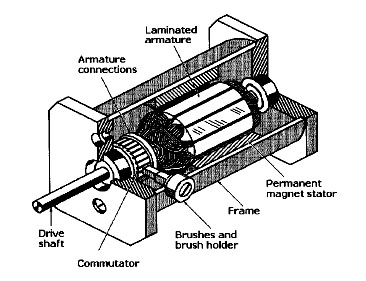
Figure: DC Servomotor
In a permanent magnet motor, the flux (φ) is constant; the torque exerted on the motor rotor can therefore be controlled by varying the armature current. If the direction of the armature current is reversed, the direction of the torque is reversed.
These motors are utilized in many low power control applications.