CLASSICAL PETRI NETS
Petri nets, ever as Carl Adam Petri has proposed them in 1962 year, have formed a classical model of concurrency that non-determinism and control flow. Petri nets are bipartite graphs and recommend a mathematically and an elegant rigorous modelling framework for discrete event dynamical systems. Modelling via Petri nets is done employing Petri net objects in a top-down fashion. In order to solving the conflicts happening in the Petri net execution, real time high-level control systems are independently modelled and integrated along with the Petri net models.
Basic Definitions
In order to attain an in-depth understanding of Petri nets and its applications, we should first start a few fundamental definitions that are concerned to Petri nets.
Definition 1: The Classical Petri Net
A Petri net is defined as a four-tuple. (P, T, IN, OUT) here,
P = { p1 , p2 , ... , pn }
T = {t1 , t2 , ... , tn }
Above is a set of transitions.
P ∪ T ≠ Φ, P ∩ T = Φ
Here, P is a set of places, and
T is a set of transitions.
IN: (P × T) → N is an input function explain the arcs emanating from places to transitions.
OUT: (P × T) → N is an output function explains the arcs emanating from transitions to source.
By graphically, the places are shown by circles and transitions by vertical or horizontal bars. Places in a Petri net presentation normally model the condition or resources or state while the transitions are employed to depict the activities in a system. In order to generate a clear view we take up an easy example as shown below.
Illustration .1
We take up an illustration of a manufacturing system constituted of only a machine and processing a job. All part undergoes an operation upon the machine and after such the part is unloaded from the system and the machine is ready for a part's fresh piece to be processed. Following figure depicts the Petri net model of the manufacturing system discussed.
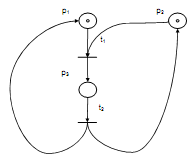
Figure: Petri Net Model of a Simple Manufacturing System Constituting of a Single Machine Processing a Job
Table no.1: Interpretation of Places and Transitions as Shown in Petri Net of Figure
|
Places
|
|
p1
|
Place representing a raw part
|
|
p2
|
Place indicating the machine M is available
|
|
p3
|
Place standing for the processing of the part
|
|
Transitions
|
|
t1
|
Transition depicting that the machine M starts processing the raw part
|
|
t2
|
Transition portraying that the machine M finishes processing of the part
|
In the manufacturing illustration shown here we have the given:
P = { p1 , p2 , p3}
T = {t1 , t2 }
The directed arcs shows the output and the input functions IN and OUT respectively such that,
IN (p1, t1) = 1
But, IN (p3, t1) = 0
In the same way,
OUT (p3, t2) = 1
But, OUT (p3, t1) = 0
Additionally, above Petri net has maximum arc weight as 1 hence can explain the above Petri net in a simpler notation employing a set A such as the Petri net is now explained as the 3-tuple (P, T, A)
Here A is,
A ⊆ (P × T ) ∪ (P × P)
Consider the Petri net above in Figure and determine the set A accordingly. By definition we contain the set A given by:
A = {
(p1, t1), (p2, t1), (p3, t2),
(t1, p3), (t2, p1), (t2, p2)
};
Definition 2: IP (tj) and OP (tj)
Moreover, for all transition tj we have IP (tj) which consequent to a set of all the places such as the arcs emanating from it end up on the transition tj. Likewise, we have the OP or tj that corresponds to a set of all the places such as the arcs emanating from it end up at the output places.
By using definition we have,
IP (tj) = { pi ∈ P : IN ( pi , tj ) ≠ 0}
OP (tj) = { pi ∈ P : OUT ( pi , tj ) ≠ 0}
Illustration 3
In above illustration 1 fined the IP (t1) and OP (t1)
Solution
IP (t1) = {p1, p2}
OP (t1) = {p3}
Definition 3: IT (pi) and OT (pi)
For every place pi we define IT (pi) like a set of input transitions such as all the arcs emanating from those transitions end up on the place pi. Likewise, we define OT (pi) like the set of output transitions such as all the arcs emanating from pi end up at those transitions.
Hence by definition we have:
IT ( pi ) = {tj ∈ T : OUT ( pi , tj ) ≠ 0}
OT ( pi ) = {tj ∈ T : IN ( pi , tj ) ≠ 0}
Thus proved
(b) From definition 2 and definition 3 as given above we can easily visualize that:
OP (t2) = {p1, p2}
IP (t1) = {p1, p2}
Hence we can say that,
OP (t2) = IP (t1) = {p1, p2}
Thus proved
Definition 4: Marking of a Petri Net
A marking of a Petri net is a function M: P → N, here N is a set of natural numbers.
A marked Petri net is a Petri net along with an associated marking.
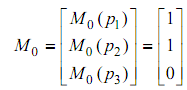
A marking of a Petri net is a vector (n × 1), here n stands for the number of places in the Petri net. Along with each place specific number of tokens are associated that are shown by dots. Mostly M0 is utilized to represent the primary state of the Petri net. Usually the term state and marking are employed interchangeably.
Hence initial marking M0 is defined as:
Illustration .6
In the Petri net represented in the figure of illustration.1 the initial marking is specified by the following vector as: